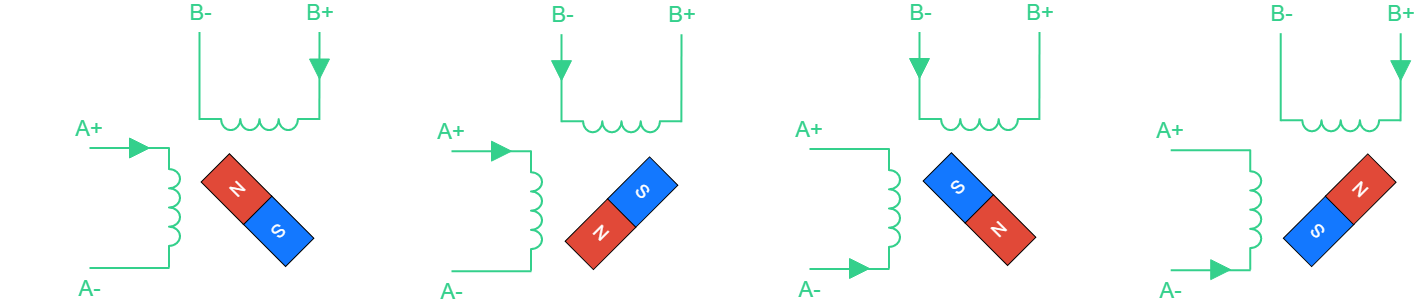
图11:波形模式步骤
全步模式:两相始终同时通电。图12 显示了此驱动模式的不同步骤。步骤与波动模式相似,最明显的区别是在此模式下,由于更多的电流在电机中流动并且产生了更强的磁场,因此电机能够产生更高的转矩。
图12:全步模式步骤
半步模式:是波动模式和全步模式的组合(请参 见图12)。使用此组合可使步长减小一半(在这种情况下,从45°代替90°)。唯一的缺点是电动机产生的转矩不是恒定的,因为当两相都通电时转矩较高,而当只有一相通电时转矩较小。
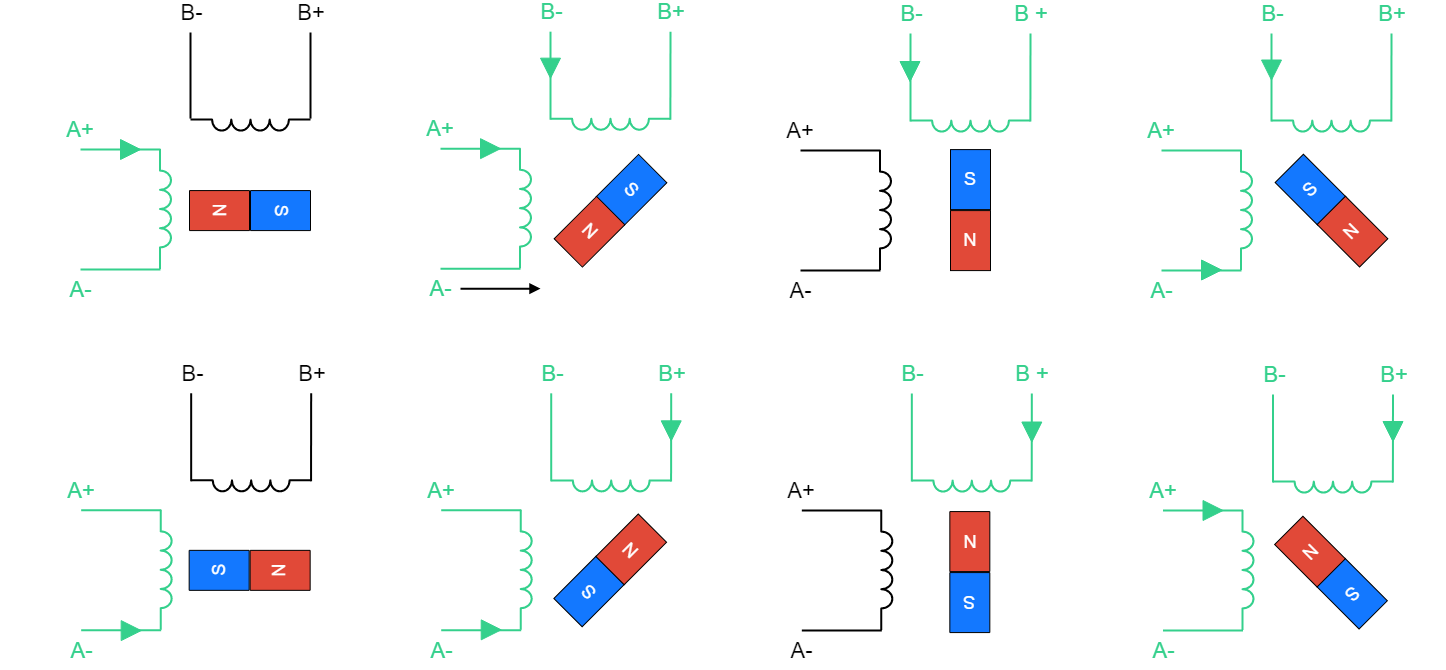
图13:半步模式步骤
微步进:可以看作是半步模式的进一步增强,因为它可以进一步减小步长,并具有恒定的转矩输出。这是通过控制每个相中流过的电流强度来实现的。与以前的解决方案相比,使用此模式需要更复杂的电机驱动器。图14 显示了微步进的工作原理。如果I MAX 是在一个相中从左开始的最大电流,在第一幅图中I A = I MAX且I B =0。在下一步中,控制电流以使I A = 0.92 x I MAX和I B = 0.38 x I MAX,产生的磁场与前一个磁场相比顺时针旋转22.5°。以不同的电流值重复此步骤,以达到45°,67.5°和90°位置。与半步模式相比,指针旋转幅度比半步减小一半,但有可能走得更远。使用微步进有助于达到非常高的位置分辨率,但是此优点的代价是需要更复杂的设备来控制电动机,并且每步产生的转矩较小。的确,转矩与定子磁场和转子磁场之间的夹角正弦成正比。因此,当步距较小时,转矩较小。这可能会导致丢失某些步骤,这意味着即使定子绕组中的电流发生变化,转子的位置也不会改变。

图14:微步进
以上所述就步进电机的四种不同的驱动技术为波动模式,全步模式,半步模式和微步进模式。