注:IO控制模式时内置振荡器,拨码或开关量信号控制电机启停,可外接电位器或电压调速。电机默认自动半流。
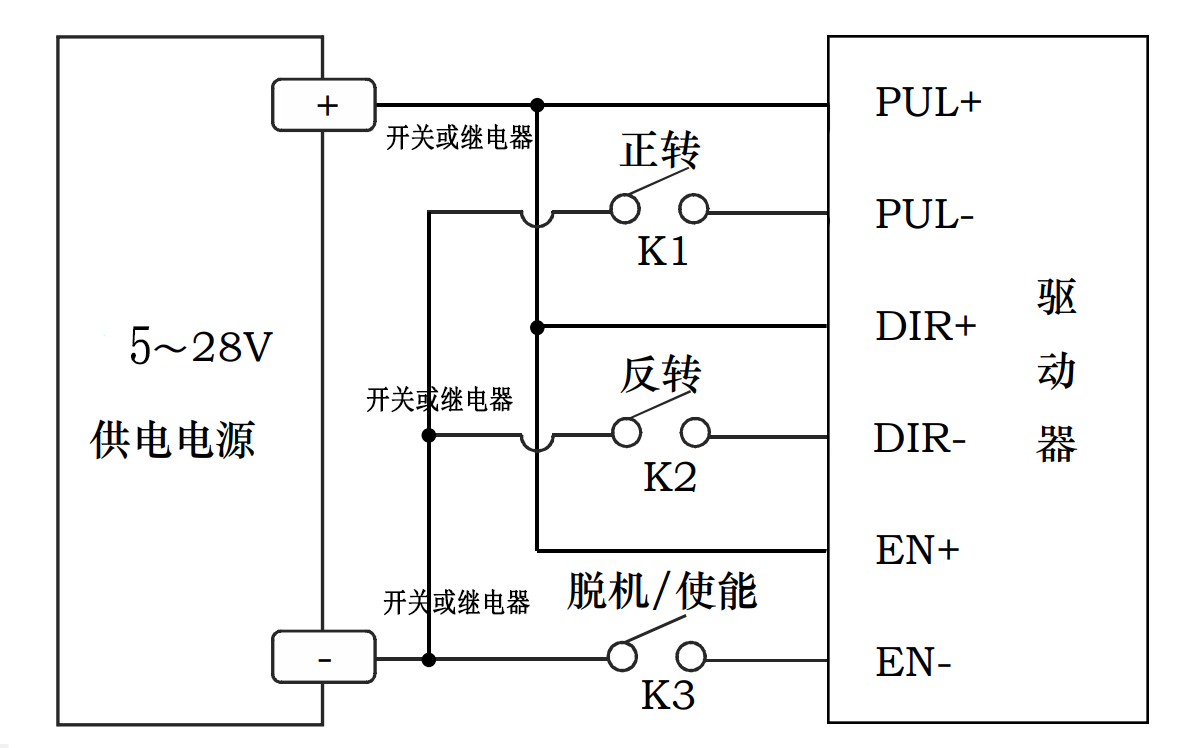
IO控制模式
IO控制模式(带C驱动器)驱动器处于受控自运行模式。
实现方式:无需PLC发脉冲控制电机正反转,利用驱动器PUL+ PUL-和DIR+ DIR-控制端输入5~28VDC电平信号即可实现电机正反转。
应用:PUL+ PUL-端高电平DIR+ DIR-低电平或悬空,电机正转,当PUL+ PUL-端低电平悬空DIR+ DIR-高电平则电机反转。
电机转动速度可通过拨码开关条件,16档可选。
注:PUL+ DIR+EN+接通5V~28V电源正端;PUL- DIR- EN-接通5~28V负端控制,负端可以使用继电器控制也可以使用PLC控制。
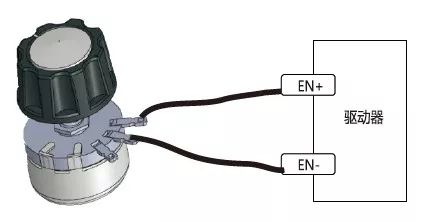
电压调速模式
电压调速模式(带V驱动器)驱动器处于受控自运行模式。
定义:模式是受控自运行模式,驱动器无需通过信号源(PLC,控制板等)发送脉冲,也无须给信号端输入开关信号,驱动器即可控制步进电机做单一方向运动。速度可以通过拨码开关设定。
实现方式:无需PLC发脉冲/方向脉冲,利用驱动器EN+ EN-控制端,外接100K及以上电位器,通过控制调节电位器的阻值实现电机由0到设定值速度的无级转换。
该驱动器的最高速度由拨码设定。电位器电阻阻值越大速度越高,反之越小。0阻值时电机停止运转。
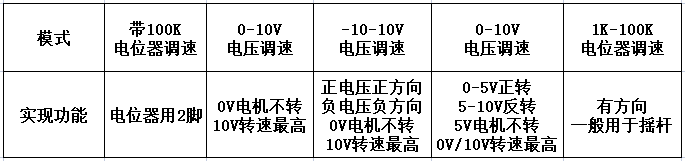
该模式下还有其它几个衍生功能:
普通电位器调速:0~10V电压调速;-10~10V电压调速;摇杆调速等等
如下所示:
调速模式衍生驱动器
常规调速模式驱动器
说明:持续自运行模式下,通过拨码开关设定电机最高速度,可根据客户需求定制。通过外接电位器可调节,通过拨码设定的最高速度至0转/分之间任意速度。电位器阻值越高,速度越接近最高速度。用户在选型电位器时尽量选用100K阻值及以上的电位器。阻值为0时,速度为0。
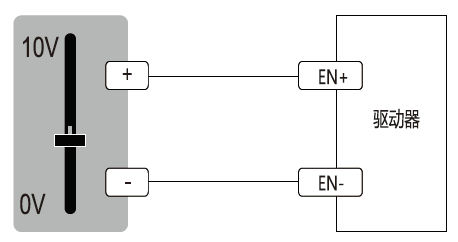
说明:持续自运行模式下,通过拨码开关设定电机最高速度,可根据需求定制。用户可改变输入电压来调节拨码设定的最高速度至0转/分之间任意速度。电压越接近10V,速度越接近最高速度。电压为0时,速度为0。
注意最高输入电压不得超过10.5VDC。
带方向调速模式驱动器
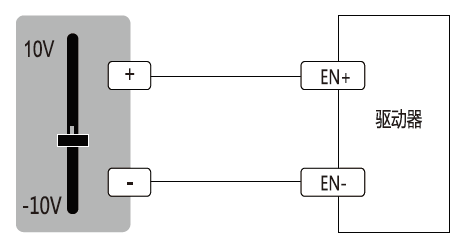
说明:根据电压特点,实现电机正反转,持续自运行模式下,通过拨码开关设定电机最高速度。用户可改变输入电压来调节速度和方向,拨码设定最高速度至最低速度。
1.电压越接近10V,速度接近正向最高速度,电压为0,速度为0。
2.电压接近-10V,速度接近反向最高速度,电压为0,速度为0。
注意最高输入电压不得超过10.5VDC。
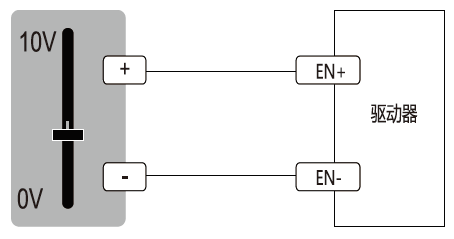
说明:根据电压特点,实现电机正反转,持续自运行模式下,通过拨码开关设定电机最高速度。用户可改变输入电压来调节速度和方向,拨码设定最高速度至最低速度。
1.电压为5V,速度为0。电压为0V或悬空时,速度接近正向最高速度。
2.电压接近10V,速度接近反向最高速度,电压为5V时,速度为0。
注意最高输入电压不得超过10.5VDC。
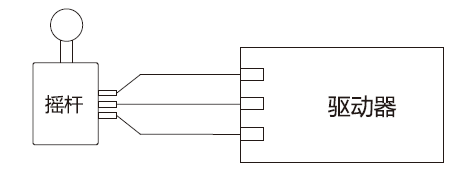
摇杆调速
利用摇杆的电阻分压特性,精准识别摇杆的角位大小变化,实现电机正反转和调速。持续自运行模式下,通过拨码开关设定电机运行速度,可根据客户需求定制。
1.摇杆位置在中间 电机停止运动;
2.摇杆位置偏移,电机方向和速度同时变化,变动角位越大速度越接近拨码设定最高值。
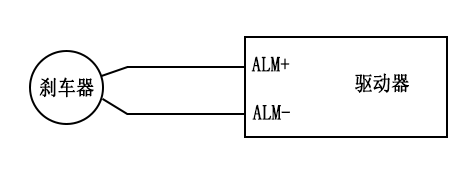
带刹车功能
普通步进电机断电不会自锁,上电才会自锁,要实现断电自锁,需在步进电机尾部加装一个抱闸装置(刹车装置),并且关联到步进装置的电路上。
电机上电时,抱闸也上电,刹车装置脱离步进电机输出轴,电机正常运转,当断电时,刹车释放紧紧抱住电机轴,确保断电瞬间锁定电机当前位置,避免电机在断电状态下发生位移变动造成电机当前运动数据错误。
立三带刹车步进电机驱动器集成有专门的刹车器控制电路,无需额外增加12~24VDC电源。
特点如下:
1、接线简单。
2、由于工作电压点,所以温升低,基本和步进电机保持一致,实测温升十几度。
3、可靠性高,由步进驱动器直接控制电机和抱闸,能百分百保证在电机转动时抱闸始终处于松开状态,如果抱闸出现故障,驱动器会报警,电机停止转动,防止损坏电机及抱闸。
4、节约成本,省掉继电器等外部器件。